Open MPI [GFB+04] is an open source software implementation of The Message Passing Interface (MPI) standard. Before the architecture and innards of Open MPI will make any sense, a little background on the MPI standard must be discussed.
The MPI standard is created and maintained by the MPI Forum, an open group consisting of parallel computing experts from both industry and academia. MPI defines an API that is used for a specific type of portable, high-performance inter-process communication (IPC): message passing. Specifically, the MPI document describes the reliable transfer of discrete, typed messages between MPI processes. Although the definition of an "MPI process" is subject to interpretation on a given platform, it usually corresponds to the operating system's concept of a process (e.g., a POSIX process). MPI is specifically intended to be implemented as middleware, meaning that upper-level applications call MPI functions to perform message passing.
MPI defines a high-level API, meaning that it abstracts away whatever underlying transport is actually used to pass messages between processes. The idea is that sending-process X can effectively say "take this array of 1,073 double precision values and send them to process Y". The corresponding receiving-process Y effectively says "receive an array of 1,073 double precision values from process X." A miracle occurs, and the array of 1,073 double precision values arrives in Y's waiting buffer.
Notice what is absent in this exchange: there is no concept of a connection occurring, no stream of bytes to interpret, and no network addresses exchanged. MPI abstracts all of that away, not only to hide such complexity from the upper-level application, but also to make the application portable across different environments and underlying message passing transports. Specifically, a correct MPI application is source-compatible across a wide variety of platforms and network types.
MPI defines not only point-to-point communication (e.g., send and receive), it also defines other communication patterns, such as collective communication. Collective operations are where multiple processes are involved in a single communication action. Reliable broadcast, for example, is where one process has a message at the beginning of the operation, and at the end of the operation, all processes in a group have the message. MPI also defines other concepts and communications patterns that are not described here. (As of this writing, the most recent version of the MPI standard is MPI-2.2 [For09]. Draft versions of the upcoming MPI-3 standard have been published; it may be finalized as early as late 2012.)
There are many implementations of the MPI standard that support a wide variety of platforms, operating systems, and network types. Some implementations are open source, some are closed source. Open MPI, as its name implies, is one of the open source implementations. Typical MPI transport networks include (but are not limited to): various protocols over Ethernet (e.g., TCP, iWARP, UDP, raw Ethernet frames, etc.), shared memory, and InfiniBand.
MPI implementations are typically used in so-called "high-performance computing" (HPC) environments. MPI essentially provides the IPC for simulation codes, computational algorithms, and other "big number crunching" types of applications. The input data sets on which these codes operate typically represent too much computational work for just one server; MPI jobs are spread out across tens, hundreds, or even thousands of servers, all working in concert to solve one computational problem.
That is, the applications using MPI are both parallel in nature and highly compute-intensive. It is not unusual for all the processor cores in an MPI job to run at 100% utilization. To be clear, MPI jobs typically run in dedicated environments where the MPI processes are the only application running on the machine (in addition to bare-bones operating system functionality, of course).
As such, MPI implementations are typically focused on providing extremely high performance, measured by metrics such as:
The first version of the MPI standard, MPI-1.0, was published in 1994 [Mes93]. MPI-2.0, a set of additions on top of MPI-1, was completed in 1996 [GGHL+96].
In the first decade after MPI-1 was published, a variety of MPI implementations sprung up. Many were provided by vendors for their proprietary network interconnects. Many other implementations arose from the research and academic communities. Such implementations were typically "research-quality," meaning that their purpose was to investigate various high-performance networking concepts and provide proofs-of-concept of their work. However, some were high enough quality that they gained popularity and a number of users.
Open MPI represents the union of four research/academic, open source MPI implementations: LAM/MPI, LA/MPI (Los Alamos MPI), and FT-MPI (Fault-Tolerant MPI). The members of the PACX-MPI team joined the Open MPI group shortly after its inception.
The members of these four development teams decided to collaborate when we had the collective realization that, aside from minor differences in optimizations and features, our software code bases were quite similar. Each of the four code bases had their own strengths and weaknesses, but on the whole, they more-or-less did the same things. So why compete? Why not pool our resources, work together, and make an even better MPI implementation?
After much discussion, the decision was made to abandon our four existing code bases and take only the best ideas from the prior projects. This decision was mainly predicated upon the following premises:
Thus, Open MPI was born. Its first Subversion commit was on November 22, 2003.
For a variety of reasons (mostly related to either performance or portability), C and C++ were the only two possibilities for the primary implementation language. C++ was eventually discarded because different C++ compilers tend to lay out structs/classes in memory according to different optimization algorithms, leading to different on-the-wire network representations. C was therefore chosen as the primary implementation language, which influenced several architectural design decisions.
When Open MPI was started, we knew that it would be a large, complex code base:
We therefore spent a good deal of time designing an architecture that focused on three things:
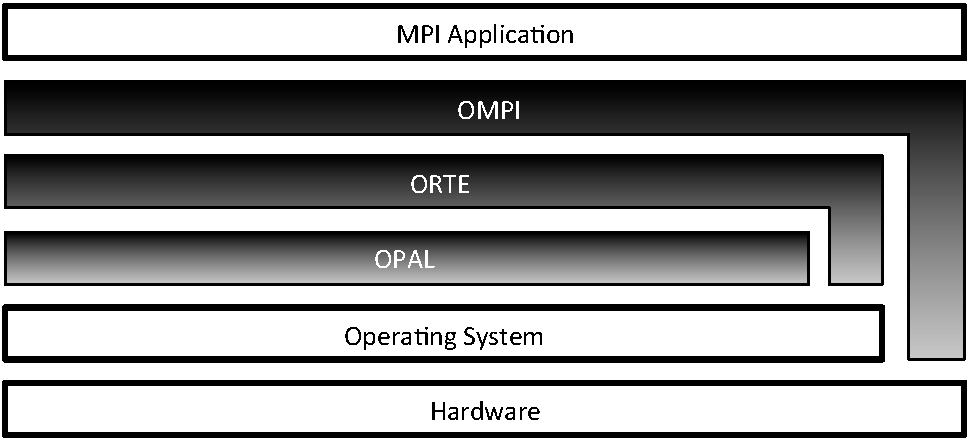
Open MPI has three main abstraction layers, shown in Figure 15.1:
OPAL also provides Open MPI's core portability between different operating systems, such as discovering IP interfaces, sharing memory between processes on the same server, processor and memory affinity, high-precision timers, etc.
In simple environments with little or no distributed computational
support, ORTE uses rsh or ssh to launch the individual
processes in parallel jobs. More advanced, HPC-dedicated
environments typically have schedulers and resource managers for
fairly sharing computational resources between many users. Such
environments usually provide specialized APIs to launch and regulate
processes on compute servers. ORTE supports a wide variety of such
managed environments, such as (but not limited to): Torque/PBS
Pro, SLURM, Oracle Grid Engine, and LSF.
Since portability is a primary requirement, the MPI layer supports a wide variety of network types and underlying protocols. Some networks are similar in their underlying characteristics and abstractions; some are not.
Although each abstraction is layered on top of the one below it, for performance reasons the ORTE and OMPI layers can bypass the underlying abstraction layers and interact directly with the operating system and/or hardware when needed (as depicted in Figure 15.1). For example, the OMPI layer uses OS-bypass methods to communicate with certain types of NIC hardware to obtain maximum networking performance.
Each layer is built into a standalone library. The ORTE library depends on the OPAL library; the OMPI library depends on the ORTE library. Separating the layers into their own libraries has acted as a wonderful tool for preventing abstraction violations. Specifically, applications will fail to link if one layer incorrectly attempts to use a symbol in a higher layer. Over the years, this abstraction enforcement mechanism has saved many developers from inadvertently blurring the lines between the three layers.
Although the initial members of the Open MPI collaboration shared a similar core goal (produce a portable, high-performance implementation of the MPI standard), our organizational backgrounds, opinions, and agendas were—and still are—wildly different. We therefore spent a considerable amount of time designing an architecture that would allow us to be different, even while sharing a common code base.
Run-time loadable components were a natural choice (a.k.a., dynamic shared objects, or "DSOs", or "plugins"). Components enforce a common API but place few limitations on the implementation of that API. Specifically: the same interface behavior can be implemented multiple different ways. Users can then choose, at run time, which plugin(s) to use. This even allows third parties to independently develop and distribute their own Open MPI plugins outside of the core Open MPI package. Allowing arbitrary extensibility is quite a liberating policy, both within the immediate set of Open MPI developers and in the greater Open MPI community.
This run-time flexibility is a key component of the Open MPI design
philosophy and is deeply integrated throughout the entire
architecture.
Case in point: the Open MPI v1.5 series includes 155 plugins.
To list just a few examples, there are plugins for different memcpy()
implementations, plugins for how to launch processes on
remote servers, and plugins for how to communicate on different types
of underlying networks.
One of the major benefits of using plugins is that multiple groups of developers have freedom to experiment with alternate implementations without affecting the core of Open MPI. This was a critical feature, particularly in the early days of the Open MPI project. Sometimes the developers didn't always know what was the right way to implement something, or sometimes they just disagreed. In both cases, each party would implement their solution in a component, allowing the rest of the developer community to easily compare and contrast. Code comparisons can be done without components, of course, but the component concept helps guarantee that all implementations expose exactly the same external API, and therefore provide exactly the same required semantics.
As a direct result of the flexibility that it provides, the component concept is utilized heavily throughout all three layers of Open MPI; in each layer there are many different types of components. Each type of component is enclosed in a framework. A component belongs to exactly one framework, and a framework supports exactly one kind of component. Figure 15.2 is a template of Open MPI's architectural layout; it shows a few of Open MPI's frameworks and some of the components that they contain. (The rest of Open MPI's frameworks and components are laid out in the same manner.) Open MPI's set of layers, frameworks, and components is referred to as the Modular Component Architecture (MCA).
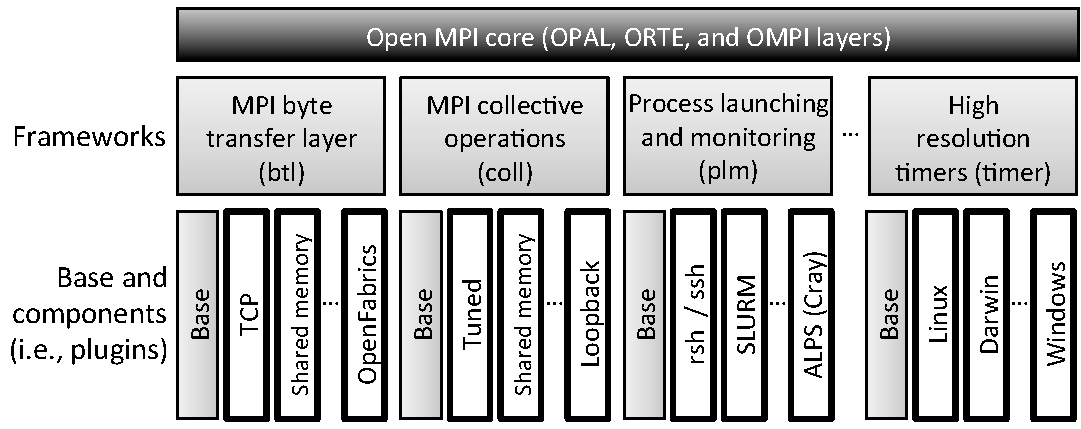
btl and coll are in the OMPI layer, plm is in the ORTE layer, and timer is in the OPAL layer.Finally, another major advantage of using frameworks and components is their inherent composability. With over 40 frameworks in Open MPI v1.5, giving users the ability to mix-n-match different plugins of different types allows them to create a software stack that is effectively tailored to their individual system.
Each framework is fully self-contained in its own subdirectory in the
Open MPI source code tree. The name of the subdirectory is the same
name as the framework; for example, the memory framework is in
the memory directory.
Framework directories contain at least the following three items:
<framework>.h will be located in the top-level framework
directory (e.g., the Memory framework contains
memory/memory.h). This well-known header file defines the
interfaces that each component in the framework must support. This
header includes function pointer typedefs for the interface
functions, structs for marshaling these function pointers, and any
other necessary types, attribute fields, macros, declarations, etc.
base subdirectory contains the glue
code that provides the core functionality of the framework. For
example, the memory framework's base directory is memory/base.
The base is typically comprised of logistical grunt
work such as finding and opening components at run-time, common
utility functionality that may be utilized by multiple components,
etc.
memory/posix subdirectory contains
the POSIX component in the Memory framework).
Similar to how each framework defines the interfaces to which its components must adhere, frameworks also define other operational aspects, such as how they bootstrap themselves, how they pick components to use, and how they are shut down. Two common examples of how frameworks differ in their setup are many-of-many versus one-of-many frameworks, and static versus dynamic frameworks.
Many-of-many frameworks.
Some frameworks have functionality that can be implemented multiple different ways in the same process. For example, Open MPI's point-to-point network framework will load multiple driver plugins to allow a single process to send and receive messages on multiple network types.
Such frameworks will typically open all components that they can find and then query each component, effectively asking, "Do you want to run?" The components determine whether they want to run by examining the system on which they are running. For example, a point-to-point network component will look to see if the network type it supports is both available and active on the system. If it is not, the component will reply "No, I do not want to run", causing the framework to close and unload that component. If that network type is available, the component will reply "Yes, I want to run", causing the framework to keep the component open for further use.
One-of-many frameworks.
Other frameworks provide functionality for which it does not make sense to have more than one implementation available at run-time. For example, the creation of a consistent checkpoint of a parallel job—meaning that the job is effectively "frozen" and can be arbitrarily resumed later—must be performed using the same back-end checkpointing system for each process in the job. The plugin that interfaces to the desired back-end checkpointing system is the only checkpoint plugin that must be loaded in each process—all others are unnecessary.
Dynamic frameworks.
Most frameworks allow their components to be loaded at run-time via DSOs. This is the most flexible method of finding and loading components; it allows features such as explicitly not loading certain components, loading third-party components that were not included in the main-line Open MPI distribution, etc.
Static frameworks.
Some one-of-many frameworks have additional constraints that force
their one-and-only-one component to be selected at compile time (versus
run time). Statically linking one-of-many components allows direct
invocation of its member functions (versus invocation via function
pointer), which may be important in highly performance-sensitive
functionality. One example is the memcpy framework, which
provides platform-optimized memcpy() implementations.
Additionally, some frameworks provide functionality that may need to
be utilized before Open MPI is fully initialized.
For example, the use of some network stacks require complicated memory
registration models, which, in turn, require replacing the C library's
default memory management routines.
Since memory management is intrinsic to an entire process, replacing
the default scheme can only be done pre-main.
Therefore, such components must be statically linked into Open MPI
processes so that they can be available for pre-main hooks, long
before MPI has even been initialized.
Open MPI plugins are divided into two parts: a component struct and a module struct. The component struct and the functions to which it refers are typically collectively referred to as "the component." Similarly, "the module" collectively refers to the module struct and its functions. The division is somewhat analogous to C++ classes and objects. There is only one component per process; it describes the overall plugin with some fields that are common to all components (regardless of framework). If the component elects to run, it is used to generate one or more modules, which typically perform the bulk of the functionality required by the framework.
Throughout the next few sections, we'll build up the structures necessary for the TCP component in the BTL (byte transfer layer) framework. The BTL framework effects point-to-point message transfers; the TCP component, not surprisingly, uses TCP as its underlying transport for message passing.
Component struct.
Regardless of framework, each component contains a well-known,
statically allocated and initialized component struct.
The struct must be named according to the template
mca_<framework>_<component>_component. For example, the
TCP network driver component's struct in the BTL framework is named
mca_btl_tcp_component.
Having templated component symbols both guarantees that there will be
no name collisions between components, and allows the MCA core to find
any arbitrary component struct via dlsym(2) (or the appropriate
equivalent in each supported operating system).
The base component struct contains some logistical information, such as the component's formal name, version, framework version adherence, etc. This data is used for debugging purposes, inventory listing, and run-time compliance and compatibility checking.
struct mca_base_component_2_0_0_t {
/* Component struct version number */
int mca_major_version, mca_minor_version, mca_release_version;
/* The string name of the framework that this component belongs to,
and the framework's API version that this component adheres to */
char mca_type_name[MCA_BASE_MAX_TYPE_NAME_LEN + 1];
int mca_type_major_version, mca_type_minor_version,
mca_type_release_version;
/* This component's name and version number */
char mca_component_name[MCA_BASE_MAX_COMPONENT_NAME_LEN + 1];
int mca_component_major_version, mca_component_minor_version,
mca_component_release_version;
/* Function pointers */
mca_base_open_component_1_0_0_fn_t mca_open_component;
mca_base_close_component_1_0_0_fn_t mca_close_component;
mca_base_query_component_2_0_0_fn_t mca_query_component;
mca_base_register_component_params_2_0_0_fn_t
mca_register_component_params;
};
The base component struct is the core of the TCP BTL component; it contains the following function pointers:
NULL open function pointer.
The TCP BTL component open function mainly initializes some data structures and ensures that invalid parameters were not set by the user.
The TCP BTL component close function closes listening sockets and frees resources (e.g., receiving buffers).
The BTL framework does not use the generic query function (it defines its own; see below), so the TCP BTL does not fill it in.
The TCP BTL component register function creates a variety of user-settable run-time parameters, such as one which allows the user to specify which IP interface(s) to use.
The component structure can also be extended on a per-framework and/or per-component basis. Frameworks typically create a new component struct with the component base struct as the first member. This nesting allows frameworks to add their own attributes and function pointers. For example, a framework that needs a more specialized query function (as compared to the query function provided on the basic component) can add a function pointer in its framework-specific component struct.
The MPI btl framework, which provides point-to-point MPI
messaging functionality, uses this technique.
struct mca_btl_base_component_2_0_0_t {
/* Base component struct */
mca_base_component_t btl_version;
/* Base component data block */
mca_base_component_data_t btl_data;
/* btl-framework specific query functions */
mca_btl_base_component_init_fn_t btl_init;
mca_btl_base_component_progress_fn_t btl_progress;
};
As an example of the TCP BTL framework query functions, the TCP BTL
component btl_init function does several things:
(IP address, port) for each "up" IP
interface with a central repository so that other MPI processes know
how to contact it.
Similarly, plugins can extend the framework-specific component struct
with their own members.
The tcp component in the btl framework does this; it
caches many data members in its component struct.
struct mca_btl_tcp_component_t {
/* btl framework-specific component struct */
mca_btl_base_component_2_0_0_t super;
/* Some of the TCP BTL component's specific data members */
/* Number of TCP interfaces on this server */
uint32_t tcp_addr_count;
/* IPv4 listening socket descriptor */
int tcp_listen_sd;
/* ...and many more not shown here */
};
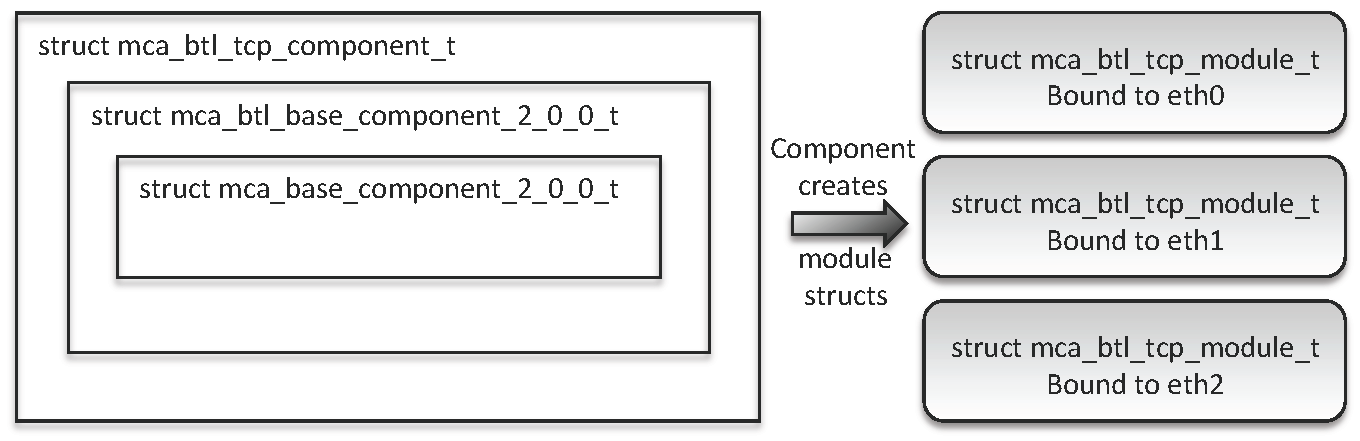
This struct-nesting technique is effectively a simple emulation of C++
single inheritance: a pointer to an instance of a struct
mca_btl_tcp_component_t can be cast to any of the
three types such that it can be used by an abstraction layer than does
not understand the "derived" types.
That being said, casting is generally frowned upon in Open MPI because it can lead to incredibly subtle, difficult-to-find bugs. An exception was made for this C++-emulation technique because it has well-defined behaviors and helps enforce abstraction barriers.
Module struct.
Module structs are individually defined by each framework; there is little commonality between them. Depending on the framework, components generate one or more module struct instances to indicate that they want to be used.
For example, in the BTL framework, one module usually corresponds to a single network device. If an MPI process is running on a Linux server with three "up" Ethernet devices, the TCP BTL component will generate three TCP BTL modules; one corresponding to each Linux Ethernet device. Each module will then be wholly responsible for all sending and receiving to and from its Ethernet device.
Tying it all together.
Figure 15.3 shows the nesting of the structures in the TCP BTL component, and how it generates one module for each of the three Ethernet devices.
Composing BTL modules this way allows the upper-layer MPI progression engine both to treat all network devices equally, and to perform user-level channel bonding.
For example, consider sending a large message across the three-device configuration described above. Assume that each of the three Ethernet devices can be used to reach the intended receiver (reachability is determined by TCP networks and netmasks, and some well-defined heuristics). In this case, the sender will split the large message into multiple fragments. Each fragment will be assigned—in a round-robin fashion—to one of the TCP BTL modules (each module will therefore be assigned roughly one third of the fragments). Each module then sends its fragments over its corresponding Ethernet device.
This may seem like a complex scheme, but it is surprisingly effective. By pipelining the sends of a large message across the multiple TCP BTL modules, typical HPC environments (e.g., where each Ethernet device is on a separate PCI bus) can sustain nearly maximum bandwidth speeds across multiple Ethernet devices.
Developers commonly make decisions when writing code, such as:
Users tend to assume that the developers will answer such questions in a way that is generally suitable for most types of systems. However, the HPC community is full of scientist and engineer power users who want to aggressively tweak their hardware and software stacks to eke out every possible compute cycle. Although these users typically do not want to tinker with the actual code of their MPI implementation, they do want to tinker by selecting different internal algorithms, choosing different resource consumption patterns, or forcing specific network protocols in different circumstances.
Therefore, the MCA parameter system was included when designing Open MPI; the system is a flexible mechanism that allows users to change internal Open MPI parameter values at run time. Specifically, developers register string and integer MCA parameters throughout the Open MPI code base, along with an associated default value and descriptive string defining what the parameter is and how it is used. The general rule of thumb is that rather than hard-coding constants, developers use run-time-settable MCA parameters, thereby allowing power users to tweak run-time behavior.
There are a number of MCA parameters in the base code of the three abstraction layers, but the bulk of Open MPI's MCA parameters are located in individual components. For example, the TCL BTL plugin has a parameter that specifies whether only TCPv4 interfaces, only TCPv6 interfaces, or both types of interfaces should be used. Alternatively, another TCP BTL parameter can be set to specify exactly which Ethernet devices to use.
Users can discover what parameters are available via a user-level
command line tool (ompi_info).
Parameter values can be set in multiple ways: on the command line, via
environment variables, via the Windows registry, or in system- or
user-level INI-style files.
The MCA parameter system complements the idea of run-time plugin selection flexibility, and has proved to be quite valuable to users. Although Open MPI developers try hard to choose reasonable defaults for a wide variety of situations, every HPC environment is different. There are inevitably environments where Open MPI's default parameter values will be unsuitable—and possibly even detrimental to performance. The MCA parameter system allows users to be proactive and tweak Open MPI's behavior for their environment. Not only does this alleviate many upstream requests for changes and/or bug reports, it allows users to experiment with the parameter space to find the best configuration for their specific system.
With such a varied group of core Open MPI members, it is inevitable that we would each learn something, and that as a group, we would learn many things. The following list describes just a few of these lessons.
Message-passing performance and resource utilization are the king and queen of high-performance computing. Open MPI was specifically designed in such a way that it could operate at the very bleeding edge of high performance: incredibly low latencies for sending short messages, extremely high short message injection rates on supported networks, fast ramp-ups to maximum bandwidth for large messages, etc. Abstraction is good (for many reasons), but it must be designed with care so that it does not get in the way of performance. Or, put differently: carefully choose abstractions that lend themselves to shallow, performant call stacks (versus deep, feature-rich API call stacks).
That being said, we also had to accept that in some cases, abstraction—not architecture—must be thrown out the window. Case in point: Open MPI has hand-coded assembly for some of its most performance-critical operations, such as shared memory locking and atomic operations.
It is worth noting that Figures 15.1 and 15.2 show two different architectural views of Open MPI. They do not represent the run-time call stacks or calling invocation layering for the high performance code sections.
Lesson learned:
It is acceptable (albeit undesirable) and unfortunately sometimes necessary to have gross, complex code in the name of performance (e.g., the aforementioned assembly code). However, it is always preferable to spend time trying to figure out how to have good abstractions to discretize and hide complexity whenever possible. A few weeks of design can save literally hundreds or thousands of developer-hours of maintenance on tangled, subtle, spaghetti code.
We actively tried to avoid re-inventing code in Open MPI that someone else has already written (when such code is compatible with Open MPI's BSD licensing). Specifically, we have no compunctions about either directly re-using or interfacing to someone else's code.
There is no place for the "not invented here" religion when trying to solve highly complex engineering problems; it only makes good logistical sense to re-use external code whenever possible. Such re-use frees developers to focus on the problems unique to Open MPI; there is no sense re-solving a problem that someone else has solved already.
A good example of this kind of code re-use is the GNU Libtool Libltdl package. Libltdl is a small library that provides a portable API for opening DSOs and finding symbols in them. Libltdl is supported on a wide variety of operating systems and environments, including Microsoft Windows.
Open MPI could have provided this functionality itself—but why? Libltdl is a fine piece of software, is actively maintained, is compatible with Open MPI's license, and provides exactly the functionality that was needed. Given these points, there is no realistic gain for Open MPI developers to re-write this functionality.
Lesson learned:
When a suitable solution exists elsewhere, do not hesitate to integrate it and stop wasting time trying to re-invent it.
Another guiding architectural principle has been to optimize for the common case. For example, emphasis is placed on splitting many operations into two phases: setup and repeated action. The assumption is that setup may be expensive (meaning: slow). So do it once and get it over with. Optimize for the much more common case: repeated operation.
For example, malloc() can be slow, especially if pages need to
be allocated from the operating system. So instead of allocating just
enough bytes for a single incoming network message, allocate enough
space for a bunch of incoming messages, divide the result up
into individual message buffers, and set up a freelist to maintain
them. In this way, the first request for a message buffer may
be slow, but successive requests will be much faster because
they will just be de-queues from a freelist.
Lesson learned:
Split common operations into (at least) two phases: setup and repeated action. Not only will the code perform better, it may be easier to maintain over time because the distinct actions are separated.
There are too many more lessons learned to describe in detail here; the following are a few more lessons that can be summed up briefly:
If we had to list the three most important things that we've learned from the Open MPI project, I think they would be as follows: